


Figure2
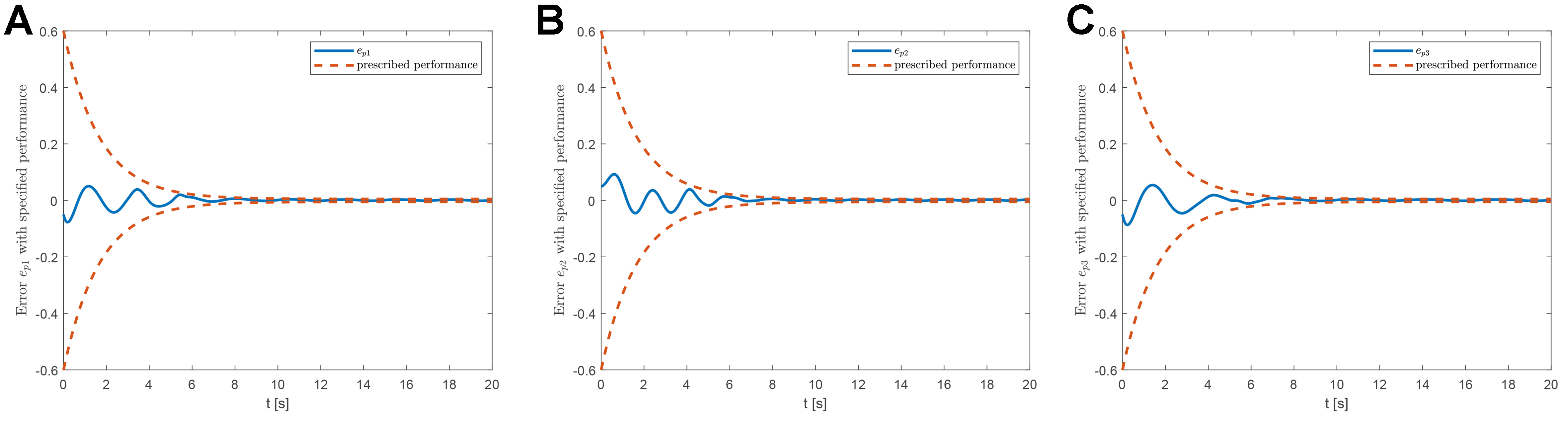
Figure 2. Tracking errors with prescribed performance under the proposed RL-based fault-tolerant attitude controller. (A) Attitude tracking error
Figure 2. Tracking errors with prescribed performance under the proposed RL-based fault-tolerant attitude controller. (A) Attitude tracking error


All published articles are preserved here permanently:
https://www.portico.org/publishers/oae/


