



fig2
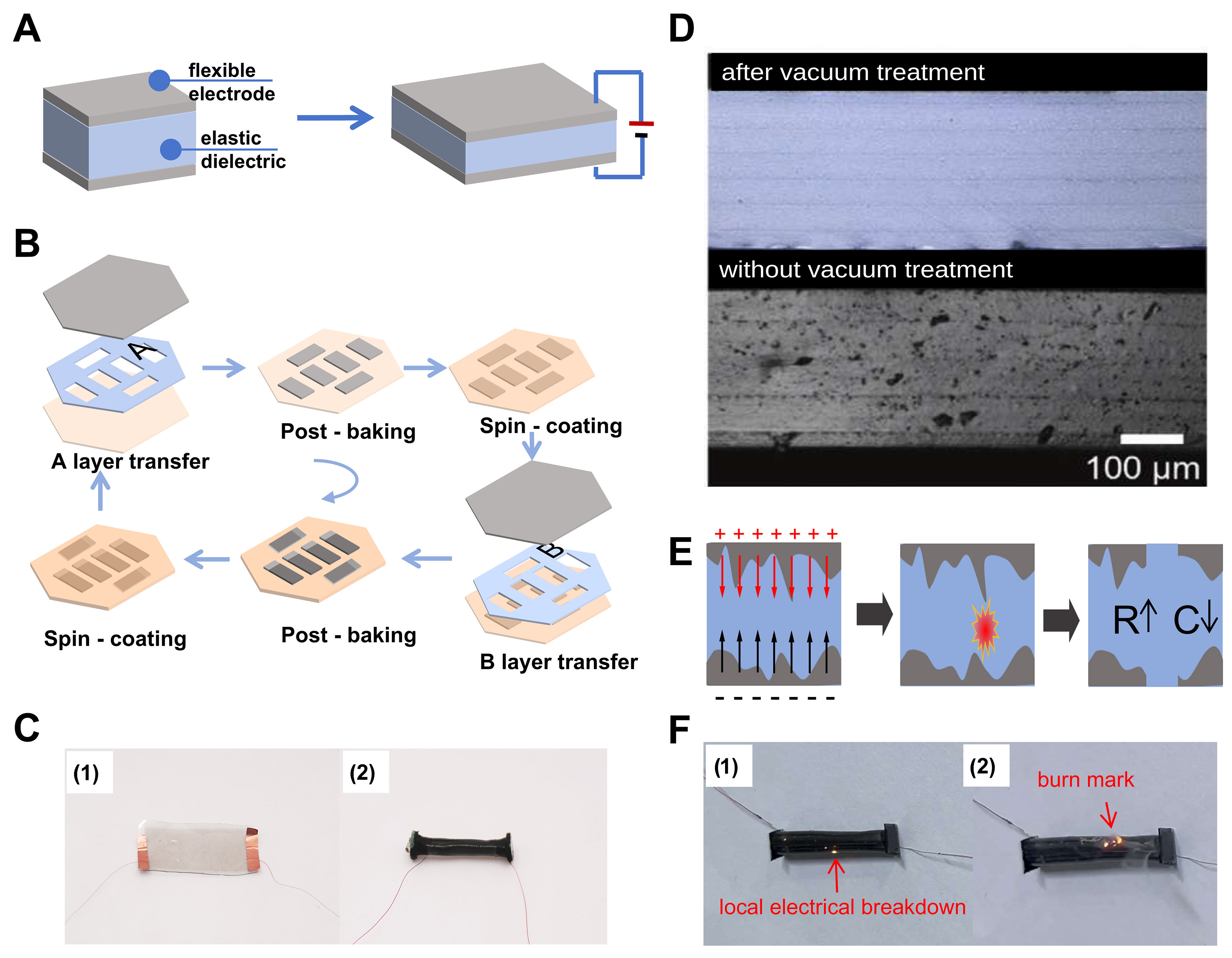
Figure 2. (A) Working principle of the single-layer DEA; (B) Schematic diagram of the DEAs device fabrication process; (C) Schematic diagram of the planar-type DEAs (1) and rolled-type DEAs (2); (D) Comparative images of DEAs cross-sections prior to vacuuming (lower figure) and subsequent to vacuuming (upper figure); (E) Schematic diagram of the self-cleaning process; (F) Local electrical breakdown and burn marks of the DEAs device. Photograph taken by the authors (Figure 2C and F). DEA: Dielectric elastomer actuator.





