



fig4
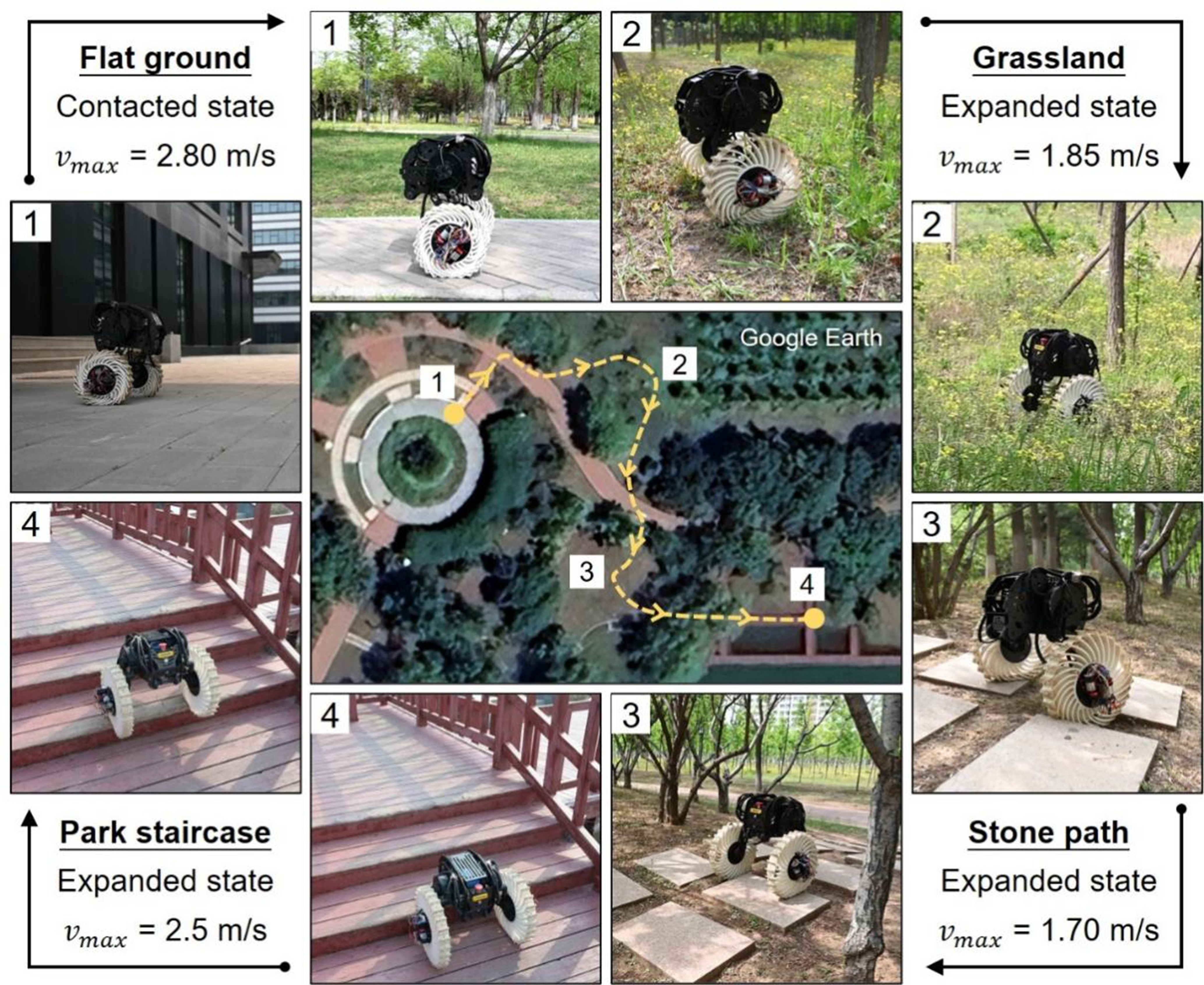
Figure 4. Outdoor locomotion test of the robot. 1. Traversing flat terrain with the spiral wheels in the contracted state. 2. Navigating grass in the expanded state. 3. Driving over a cobblestone path in the expanded state. 4. Climbing a wooden staircase in the expanded state [The map route shown in this figure was obtained using Google Earth Pro (version 7.3.3.7721, released May 28, 2020). All other elements are photographs taken during the experiments, which were captured by the authors].





